Während meiner beruflichen Tätigkeit als Berufsschullehrer konnte ich die technischen Entwicklungen in den Firmen beobachten und erleben, wie zum Beispiel an den Produktionslinien immer mehr Roboter die Arbeit übernahmen.
Als Rentner hatte ich nun die Zeit, mich mit der technischen Seite der Roboter zu beschäftigen und selbst einen Roboterarm zu konstruieren und zu bauen.
Auch hier gab es viele Anregungen und Ideen aus dem Internet.
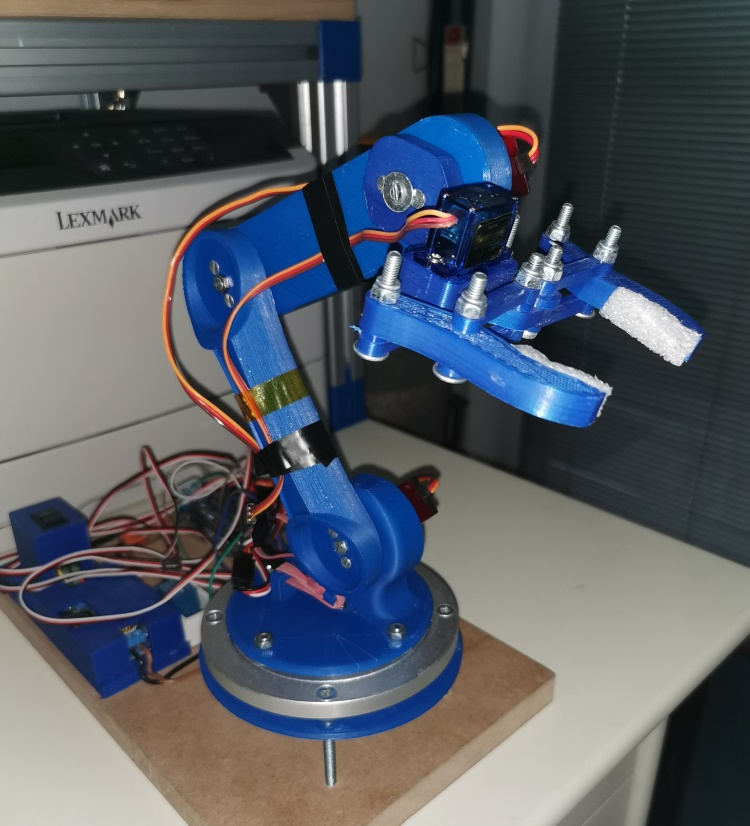
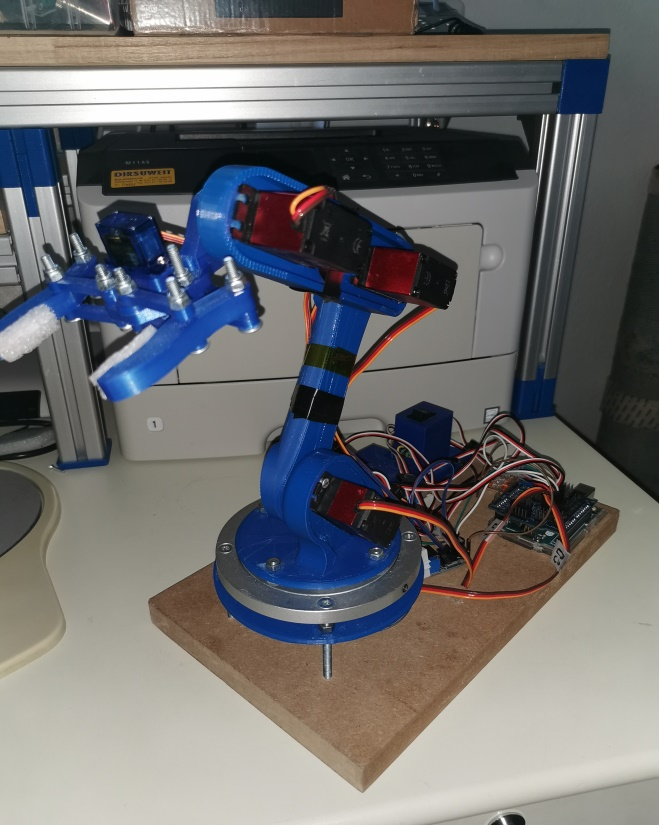
Mein Roboterarm wird mit fünf Servomotoren betrieben und von einer Benutzeroberfläche unter Windows gesteuert. Ein Drehteller ermöglicht kreisförmige Bewegungen von 0 - 180 Grad.
Der technische Aufbau umfasst:
- Arduino Uno
- Motor Shield (L293D Motor Drive)
- Steppermotor (Nema 17)
- Spannungsregler (LM2596S LED Anzeige )
Die grafische Oberfläche erlaubt es, die einzelnen Gradzahlen der Servos zu speichern, um dann die gesamte Befehlsfolge ablaufen zu lassen. Dadurch gelingt es, komplexe Aufgabenstellungen mit Hilfe des Roboterarms zu lösen.